
การประกอบชุดคิทหุ่นยนต์แบบขับเคลื่อนด้วยล้อ
ในตอนนี้ ก็อยากจะมาแนะนำการประกอบหุ่นยนต์เบื่องต้นสำหรับผู้เริ่มต้น และผู้ที่สนใจ ก็ขอออกตัวก่อนนะครับ ว่าเป็นเพียงข้อมูลเบื้องต้น รายละเอียดเพิ่มเติมนั้น สามารถหาค้นคว้าจากอินเตอร์เน็ตได้ครับ มีมากมายเลย หรือ มองหาหนังสือดีดี สักเล่มมาติดไว้อ้างอิงเลย
เอาละครับ เข้าเรื่อง เมื่อท่านได้ซื้อ ชุดคิทประกอบหุ่นยนต์เราไปแล้ว อุปกรณ์ที่จำเป็นในการประกอบก็มีดังนี้ครับ
1. เครื่องมือบัดกรี หัวแร้ง ตะกั่วบัดกรี ที่ดูดตะกั่ว ถ้ามีแท่นยึดจับชิ้นงานเล็กๆสักอันก็ดีครับ แท่นวางหัวแร้ง พร้อมฟองน้ำ เหล่านี้เป็นเครื่องมือพื้นฐานที่ควรมีติดไว้เลยครับ
2. สายไฟเบอร์ AWG24 ขนาดกำลังดี สามารถนำมาปอกสาย ไล้ตะกั่วที่ปลาย ทำเป็นสายจั้๊มเปอร์ สำหรับโปรโตบอร์ด เพื่อต่อวงจรแบบขั่วคราว ได้แน่นหนาดี ไม่หลวมง่ายๆครับ
3. คีมตัด คีมปอกสาย มีแบบเป็นสองอย่างในอันเดียว ซื้อเถอะครับ เป็นอะไรที่คุ้มมากๆ และคีมจับแบบต่างๆ

เมื่อมีอุปกรณ์ครบแล้วก็ลงมือได้เลยครับ การยึดชิ้นส่วนต่างๆ ล้อ มอเตอร์ เข้ากับโครงรถ ก็ดูตามภาพ คู่มือที่มาในชุดได้เลยครับ
ผมอยากจะแนะนำว่า ให้ทำการบัดกรีสายไฟเข้ากับมอเตอร์ก่อน เพราะถ้าประกอบมอเตอร์ลงไปแล้วค่อยบัดกรี พลั้งพลาดไป หัวแร้งอาจไปโดนที่รัดมอเตอร์ซึ่งเป็นพลาสติกใสไหม้ละลายได้
ในการประกอบล้อฟรีนั้น เวลาประกอบเสารองบอร์ดเข้ากับล้อให้รองด้วยแหวนก่อนขันน็อต เพราะรูยึดน็อตของล้อนั้นมีขนาดใหญ่กว่าเสาอยู่นิดนึง ใครที่ซื้อกับร้านเรา มีแหวนรองแถมไปให้แล้วครับ เนื่องจากผู้ผลิตไม่ได้ให้มาด้วยในชุด

เมื่อประกอบโครงรถเสร็จแล้ว ถึงเวลาให้พลังงานมัน ทำให้มันวิ่ง เดิมที่เราใช้ถ่านธรรมดาหรืออัลคาไลน์ 1.5V ขนาด AA หรือ แบบถังสี่เหลี่ยม 9V ทำให้ค่อนข้างสิ้นเปลือง ถ่าเล่นบ่อยๆ ใช้เป็นถ่านชาร์จน่าจะคุ้มกว่า หากเป็นถ่านชาร์จทั่วไป Ni-MH ที่ขนาด AA จะมีโวลเตจที่ 1.2 หากใช้รางถ่าน 4 ก้อน ก็จะได้เพียง 4.8 V โดยปกติแหล่งจ่ายไฟที่เข้ามาในระบบควรจะอยู่ที่ 6-12V
จากการที่ไปค้นดูในอินเตอร์เน็ต ทำให้รู้จักแบตชนิดอื่นๆ เพิ่มขึ้น ไม่ว่าจะเป็นที่เอามาใช้กับ เครื่องเล่นวิทยุบังคับสมัยนี้ คือ Li-Po และแบบที่ใช้ในพาวเวอร์แบงค์ ซึ่งคือ Li-Ion แบตพวกนี้จะมี โวลเตจอยู่ที่ 3.7 V ถ้าต่ออนุกรมสองก้อน ก็ได้ 7.4 V กำลังดีเลย ความจุก็มาก เล่นได้นาน
ผมจึงเลือก Li-ion เบอร์ 18650 ซึ่งมีความจุมาก หลายหลายขนาดให้เลือก ทางร้านเรากำลังนำเข้ามาครับ หลังจากทดลองใช้เองมาได้ระยะหนึ่ง ก็คิดว่าคุณภาพกับราคาน่าจะอยู่ในวิสัยที่รับได้
แบต 18650 นี้ ขนาดจะใหญ่กว่า AA จึงต้องหารางถ่านมาใส่ เพื่อความสะดวกในการติดตั้ง และแน่นอน ก็ต้องมีที่ชาร์จเตรียมไว้ด้วย หรือหากทำหุ่นตัวเล็ก แบตเบอร์อื่นๆที่ก้อนเล็กลงมาก็มีนะครับ หากสนใจก็สอบถามกันเข้ามาได้
ก่อนจะต่อแบตเข้าวงจรเพื่อจ่ายกระแส ในชุดประกอบหุ่นยนต์ มีสวิทช์เปิด-ปิดมาให้ด้วย ก็ต่อผ่านสวิทช์ก่อนก็ดีนะครับ สะดวกปลอดภับมากยิ่งขึ้น ต่อไฟเสร็จ ก็ลองต่อกับมอเตอร์ดูว่ามันใช้การได้รึป่าว
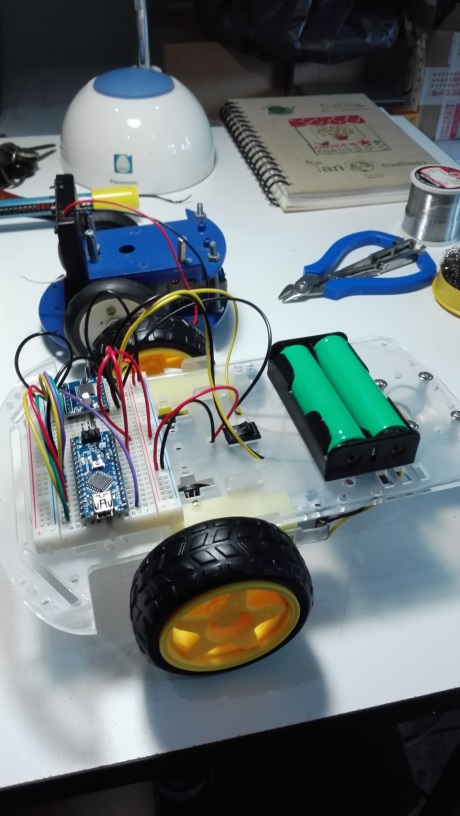
พวกโปรโตบอร์ดกับรางถ่านนี่ผมใช้กาวสองหน้าติดเข้ากับตัวรถเลย
เมื่อพร้อมจ่ายไฟแล้ว ก็มาทำให้วิ่งได้กันต่อไป โดยมีโมดูล 2 ตัวที่จะเอามาใช้ในคราวนี้ คือ
1. บอร์ด Arduino เอาไว้สั่งงานมอเตอร์
2. โมดูลขับ DC มอเตอร์ TB6612FNG 1 บอร์ดขับมอเตอร์ได้สองตัว กระแสไม่เกิน 1 แอมป์ ใช้กับชุดคิทหุ่นยนต์นี้สบายๆ
ผมลงบอร์ดทั้งสองตัวบนโปรโตบอร์ด เพื่อง่ายในการทดลองและปรับเปลี่ยนเพิ่มเติมนะครับ โดยการใช้สาย jumper ที่ทำด้วยวิธีข้างบน ก็เสียบอยู่ได้แน่นหนาดีไม่หลวมหลุดง่ายๆ

ผมทดลองต่อ และทดลองโค้ดเพื่อทดสอบระบบ ตามลิ้งทั้งสองด้านล่างนี้ครับ รูปการต่อวงจรที่เอามาแสดงก็มาจากเว็บที่ว่านั้นครับ เข้าไปดูรายละเอียดกันเองเลย โดยขาที่เชื่อมต่อระหว่าง Arduino กับ TBB6612FNG ก็ดูให้ดีๆนะครับ ถ้าใช้โค้ดจากลิ้งที่ 2 ก็เข้าไปดูในโค้ดแล้วต่อตามนั้นเลย

1. http://letsmakerobots.com/node/38550
2. http://bildr.org/2012/04/tb6612fng-arduino/
*ข้อควรระวัง การต่อแบตเตอรี่ ผมทำคนละแบบกับในรูปนี้นะครับ ผมใช้แบตเตอรี่ชุดเดียวต่อตรงเข้ากับบอร์ด Arduino และบอร์ด TB6612FNG เลย โดยผ่านทางโปรโตบอร์ด (สังเกตได้จากรูปหุ่นยนต์จริงด้านบน)
หลักๆ คือ ขาที่เป็น PWMA สำหรับควบคุมความเร็วมอเตอร์ และอีกสองขา (AIN1 AIN2) ที่เป็นตัวกำหนดทิศทางการหมุนของมอเตอร์ (สำหรับมอเตอร์ A) และอีกชุดหนึ่งสำหรับ มอเตอร์ B ทั้งสองชุดต่อเข้ากับขา digital I/O ของ Arduino และขาอื่นๆ ดูตามรูป
เมื่อต่อเสร็จเรียบร้อย ก็คอมไพล์และอัพโหลดโค้ดลง Arduino ได้เลยครับ ในเรื่องของ Arduino นี้ ก็ไปหารายละเอียดเพิ่มเติมจากแหล่งอื่นๆได้นะครับ มีเยอะแยะมากมาย
เมื่อเราได้ หุ่นยนต์รถ มาแล้ว ก็สามารถต่อยอดให้มันทำอะไรได้หลากหลาย สุดแท้แต่ความต้องการของท่านแล้วละครับ อาจจะเริ่มด้วย ต่อ เซ็นเซอร์อินฟราเรท ตรวจจับเส้น ทำให้มันเป็นหุ่นยนต์เดินตามเส้นอัตโนมัติก็ได้ หรือให้ล้ำขึ้นมาอีก ต่อกับ Raspberry Pi ต่อกล้อง สตรีมภาพสดๆ ผ่าน wifi มาที่คอมพิวเตอร์หรือ มือถือ อย่างนี้เป็นต้นก็ได้นะครับ
เมื่อหุ่นยนต์เราเคลื่อนที่ได้แล้ว ตอนต่อๆไป มาดูการสั่งงานมันแบบไร้สายด้วยโมดูล NRF24L01 และการทำหุ่นยนต์เดินตามเส้นอัตโนมัติโดยใช้ IR sensor รวมถึงการเขียนโปรแกรมควบคุมความเร็วมอเตอร์ด้วย PID control (ใครที่อยากทดลองเองก่อน ก็ดูได้จากลิ้งก์ที่ให้ไว้ด้านบนได้เลยครับ)

MEMBER
LINK

อีเมล : witaya@ioteshop.com
TOP เลื่อนขึ้นบนสุด
